【基础】原理
Lucas-Kanade算法
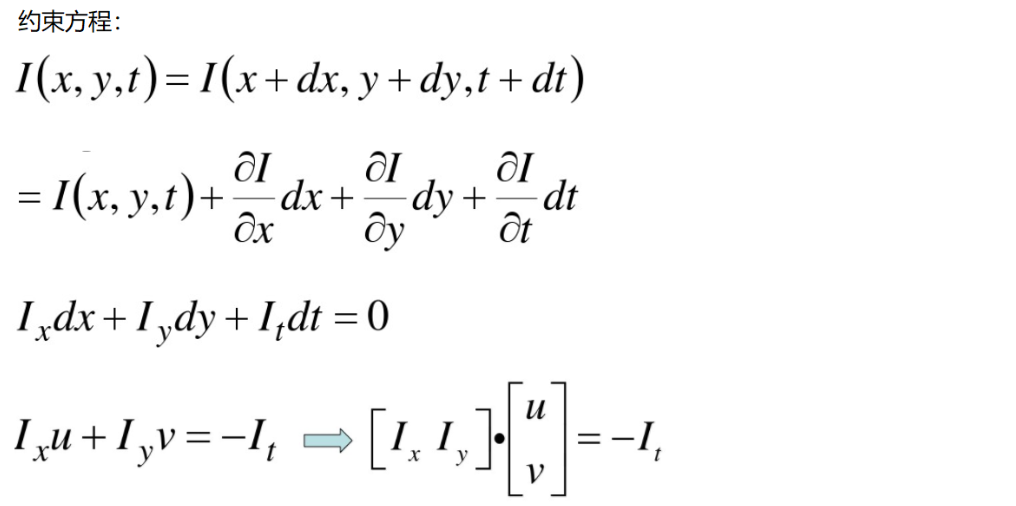
上面这个方程使用的约束条件是亮度一致与小运动
I是某一帧的像素点,x是横坐标,y是纵坐标,t是当前的对应帧数,这个约束方程的意思是,只有当我的点满足这个条件才能用,第二行是泰勒级数展开,我们最 终通过约束方程得到了最后这个式子,我们求u和v
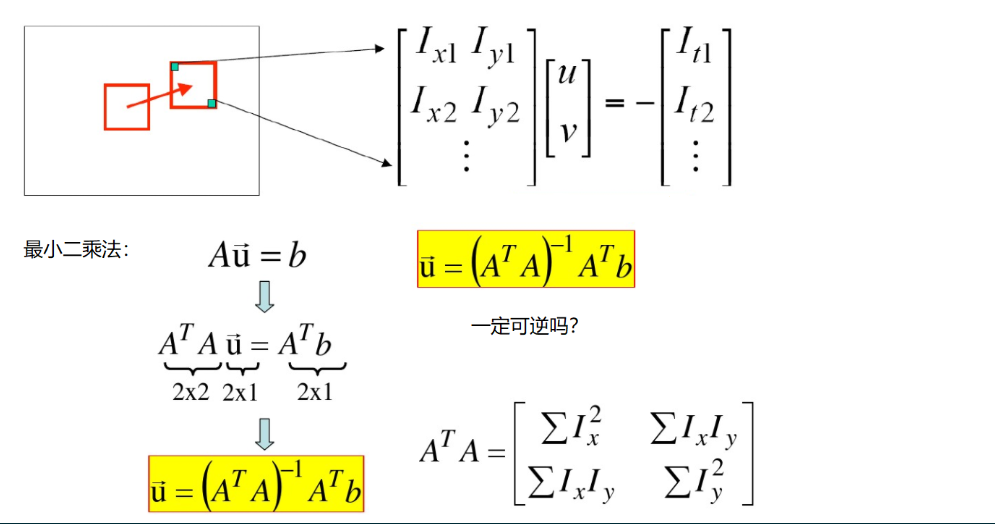
当前我们Ix,Iy,It都是已知的,但是现在有两个未知量,现在还求不出来,这个时候我们用到第三个约束条件空间一致,我们下面这个图里有两个红框,这两个红 框的u和v一致,所以我们通过(矩阵大小)的平方个方程求解2个未知数(u,v),这样我们就得到了多组解