【基础】openCV实现光流估计
1.Lucas-Kanade方法进行光流估计
cv2.calcOpticalFlowPyrLK(prevlmage, nextlmage, prevPts, None,winSize,maxLevel)
参数:
prevlmage:前一帧图像
nextlmage:当前帧图像
prevPts:待跟踪的特征点向量
winSize:搜索窗口的大小
maxLevel:最大的金字塔层数
返回值:
nextPts:输出跟踪特征点向量
status:特征点是否找到,找到为1,没找到为0
2.角点检测方法
cv2.goodFeaturesToTrack(img, mask=None, maxCorners, qualityLevel, minDistance)
通常来说角点可逆,非角点不可逆,所以我们每次进行光流估计前需要先进行角点检测
参数:
image:输入图像,是八位的或者32位浮点型,单通道图像,所以有时候用灰度图
maxCorners:返回最大的角点数,是最有可能的角点数。如果这个参数不大于0,那么表示没有角点数的限制。按照角点强度降序排序,超过maxCorners的角点将被舍弃。
qualityLevel:品质因子。筛选角点,品质因子越大,特征值越大的越好,得到的角点越少。检测出的角点强度值小于品质因子的会被抛弃。
minDistance:返回的角点之间最小的欧式距离。在这个距离范围内判断哪个品质因子最好,只要这一个角点。
mask:检测区域。如果图像不是空的(它需要具有CV_8UC1类型和与图像相同的大小),它指定检测角的区域。
blockSize:是协方差矩阵滤波的窗口大小。
gradientSize:为sobel算子求微分的窗口的大小
useHarrisDetector:选择是否采用Harris角点检测,默认是false.
k:Harris检测的自由参数。
返回值:
corners:输出的角点坐标
3.程序演示
import cv2
import numpy as np
# 获取数据
video = cv2.VideoCapture('test.avi')
# 获取第一帧图像
ret,frame_one = video.read()
gray_one = cv2.cvtColor(frame_one,cv2.COLOR_BGR2GRAY) #变成灰度图
# 角点检测,参数:输入图像,角点最大数量,品质因子,距离
p0 = cv2.goodFeaturesToTrack(gray_one, mask=None, maxCorners=100, qualityLevel=0.3, minDistance=7)
# 创建一个mask
mask = np.zeros_like(frame_one) # 全0的画板,size和第一帧图像一样大
# 轨迹线条颜色随机,[0,255)之间,输出size为(100,3),三列对应颜色BGR
color = np.random.randint(0,255,(100,3))
#(3)视频处理
while True:
ret,frame = video.read() # 返回是否打开和每一帧的结果
frame_gray = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
# 光流估计,需要传入前一帧和当前图像以及前一帧检测到的角点
# gray_one代表前一帧,frame_gray当前帧图像,p0前一帧的角点,winSize窗口大小,maxLevel金字塔层数
p1,st,err = cv2.calcOpticalFlowPyrLK(gray_one, frame_gray, p0, None,winSize=(15,15),maxLevel=2)
# p1返回角点,st有些角点找到了有些没找到,err错误状态,用不上
# st==1 角点找到了
best_new = p1[st==1] # 当前帧,所有找到的角点
best_old = p0[st==1] # 前一帧的角点
# 绘制轨迹
for i,(new,old) in enumerate(zip(best_new,best_old)): # 返回角点的下标和值
a,b = new.ravel() # 拉成一维,a等于x列,b等于y列
c,d = old.ravel()
a,b,c,d = np.array([a,b,c,d]).astype('int32') #输入的数据类型是整型
# 背景图mask,起点坐标(a,b),终点坐标(c,d),变成列表列格式tolist(),线宽为2
mask = cv2.line(mask, (a,b), (c,d), (color[i].tolist()), 2)
# 画板frame,圆心位置(a,b),圆半径5,'-1'代表实心圆
frame = cv2.circle(frame,(a,b),5,color[i].tolist(),-1)
# 图像叠加
img = cv2.add(frame,mask)
# 图像展示
cv2.imshow('img',img)
k = cv2.waitKey(150) & 0xff # 每张图停留150毫秒后消失
if k == 27: # ESC键退出
break
# 更新
gray_one = frame_gray.copy() # 使下一次循环的前一帧变成当前帧图像
p0 = best_new.reshape(-1,1,2) # -1的作用在于自动计算
# 释放资源
cv2.destroyAllWindows()
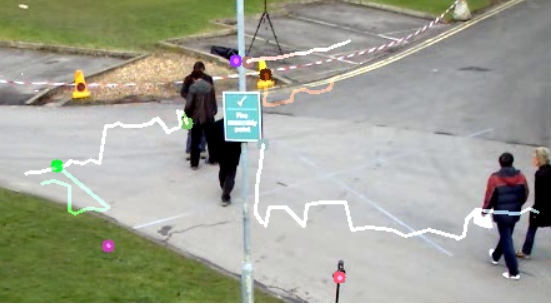
使用该方法的一些缺陷:第一帧的角点被第二帧利用,也被后续的所有帧运用,如果在第一帧没有出现A同学,那么在后续的帧中A同学出现了,那么也不会跟踪,因为使用的是前几帧的角点。一旦经过障碍物,就跟丢了。