【进阶】自适应阈值处理
1. 引入
对于色彩均衡的图像,直接使用一个阈值就能完成对图像的阈值化处理。
但是,现实遇到的情况有时候会复杂的多,这些图像的色彩是不均衡的,这时候如果只使用上节所述的一个阈值,就无法得到理想的阈值分割结果。
所以有一种改进的阈值处理方法,使用非固定的阈值来对图像进行阈值处理,这种方法就是自适应阈值处理:在进行阈值处理时,该方式通过计算每个像素点周围临近区域的加权平均值获得阈值,然后利用该动态阈值对当前像素点进行阈值处理。与普通的阈值处理方法相比,自适应阈值处理能够更好地处理明暗差异较大的图像。
2. 自适应阈值处理函数
OpenCV提供了函数cv2.adaptiveThreshold()来实现自适应阈值处理,该函数的语法格式为:
dst = cv2.adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C, dst=None)
dst:自适应阈值处理结果。src:要进行自适应阈值处理的图像(该图像必须是8位单通道的图像)。maxValue:最大值。adaptiveMethod:自适应方法。thresholdType:阈值处理方式,cv2.THRESH_BINARYOrcv2.THRESH_BINARY_INV。blockSize:块大小。一个像素在计算其阈值时所使用的邻域尺寸,通常为3、5、7等。C:常量。
函数cv2.adaptiveThreshold()根据参数adaptiveMethod来确定自适应阈值的计算方法,函数包含cv2.ADAPTIVE_THRESH_MEAN_C和cv2.ADAPTIVE_THRESH_GAUSSIAN_C两种不同的方法。这两种方法都是逐个像素地计算自适应阈值,自适应阈值等于每个像素由参数blockSize所指定邻域的加权平均值减去常量C。两种不同的方法在计算邻域的加权平均值时所采用的方式不同:
● cv2.ADAPTIVE_THRESH_MEAN_C:邻域所有像素点的权重值是一致的。
● cv2.ADAPTIVE_THRESH_GAUSSIAN_C:与邻域各个像素点到中心点的距离有关,通过高斯方程得到各个点的权重值。
3. 程序演示
"""
Author: Will Wang
Email: WillWang1998@163.com
"""
import cv2
import numpy as np
gray = cv2.imread('lena.jpg', cv2.IMREAD_GRAYSCALE)
gray = cv2.resize(gray, (350, 350))
retval, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
adaptive_thresh_mean = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 5, 3)
adaptive_thresh_gaussian = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 5, 3)
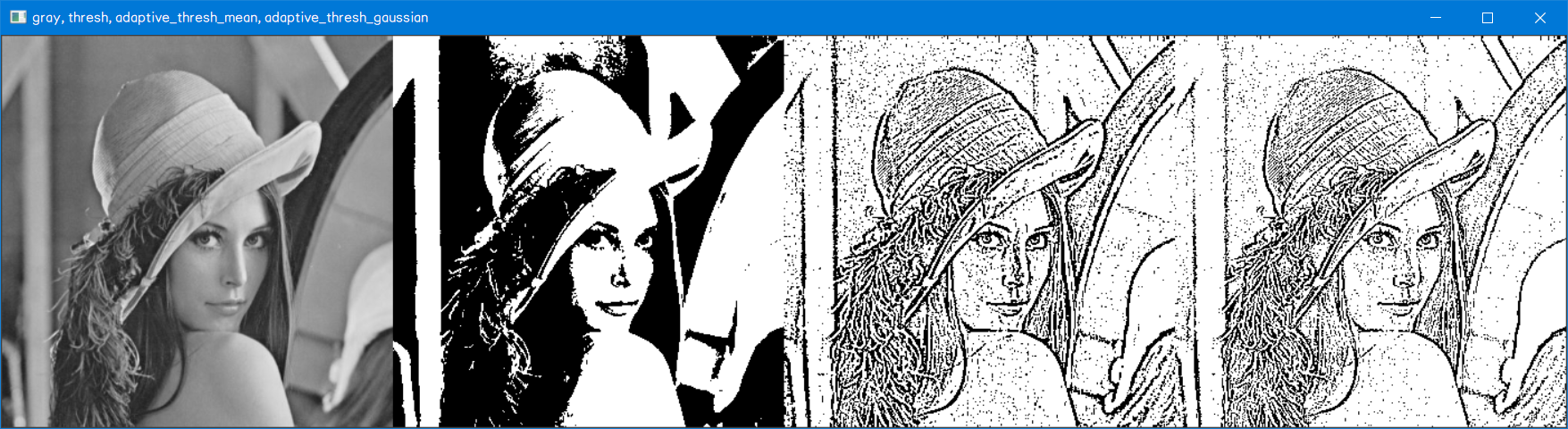
image_stack = np.hstack((gray, thresh, adaptive_thresh_mean, adaptive_thresh_gaussian))
cv2.imshow('gray, thresh, adaptive_thresh_mean, adaptive_thresh_gaussian', image_stack)
cv2.waitKey(0)
cv2.destroyAllWindows()
换一张明暗差异较大的图片试验:
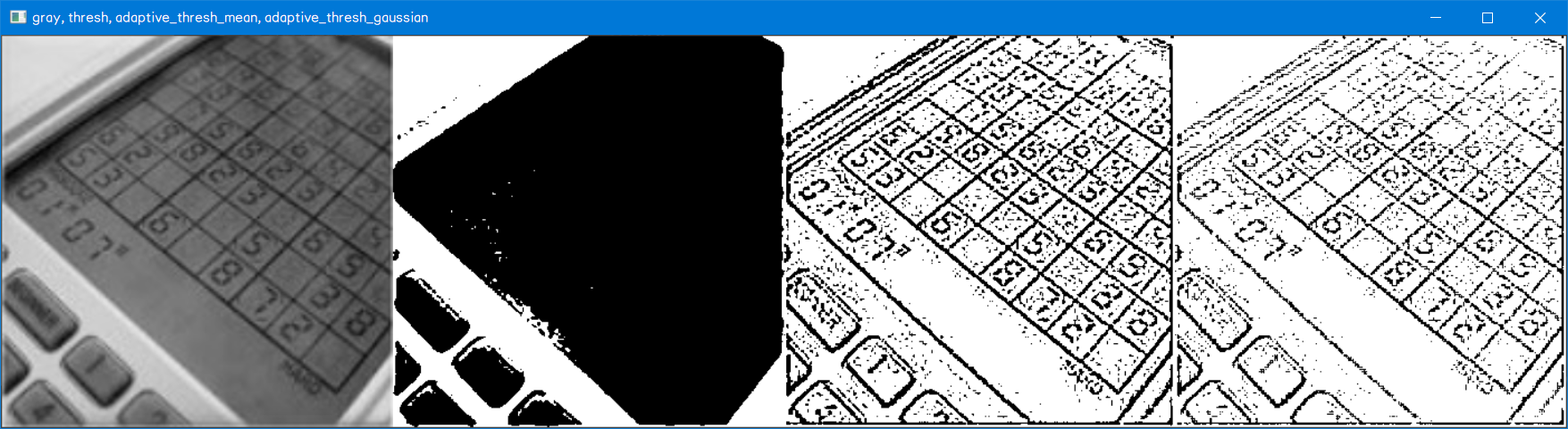
通过对比普通的阈值处理与自适应阈值处理可以发现,自适应阈值处理保留了更多的细节信息。在一些极端情况下,普通的阈值处理会丢失大量的信息,而自适应阈值处理可以得到效果更好的二值图像。